
Alibaba представила модели искусственного интеллекта Qwen, предназначенные для роботов. ИИ перестаёт быть прерогативой чат-ботов и даже ИИ-агентов — новым рубежом технологии в мировом масштабе становится робототехника.

Ryzen и DDR5-6000 на чипах Samsung — G.Skill даёт добро
Обзор Ryzen 9 9950X3D2: правильный 16-ядерник с 3D-кешем

Выбираем лучший игровой ноутбук до 100 000 рублей: сравнительное тестирование 7 интересных моделей

Обзор Intel Core Ultra 7 270K Plus — лучший Arrow Lake за полцены
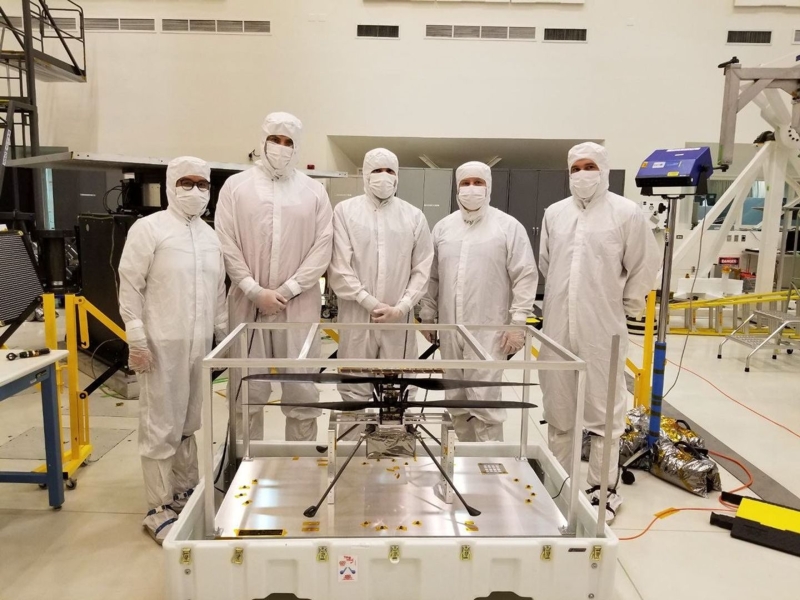
72 полёта над Марсом: как Ingenuity пережил зиму, сбои и собственную миссию

Обзор Intel Core Ultra 5 250K Plus, или Как Arrow Lake превратился в «топ за свои деньги»
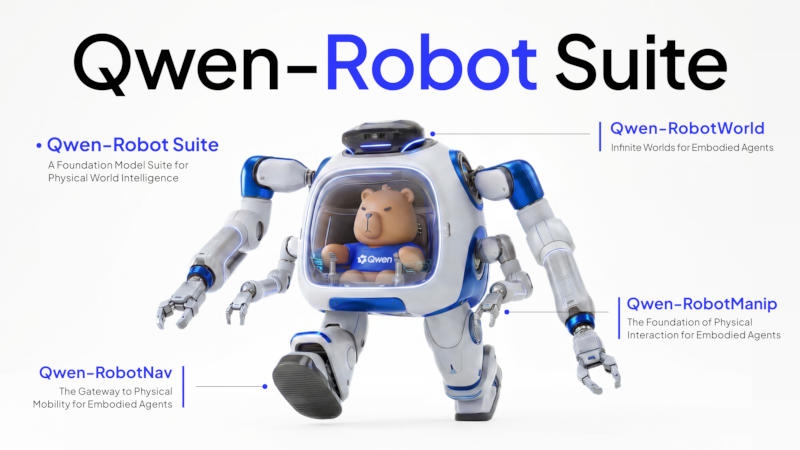
Китайский технологический гигант представил набор ИИ-моделей Qwen Robot Suite, ознаменовав свой последний шаг в направлении «воплощённого ИИ» — машин, способных воспринимать, рассуждать и взаимодействовать с физической средой. Разработку вели эксперты по ИИ в компании Alibaba — подразделения Tongyi Lab. Пакет ИИ-моделей уже проходит пилотное тестирование с некоторыми корпоративными клиентами Alibaba Cloud.
ИИ-модели демонстрируют разделение интеллекта у роботов на три взаимосвязанных уровня. Qwen-RobotNav — это визуальная языковая навигационная модель, предназначенная для того, чтобы помогать машинам в понимании физического пространства и перемещении в нём.
Она работает совместно с Qwen-RobotWorld — «моделью мира» с поддержкой видео, которая позволяет роботам прогнозировать и моделировать развитие физических сцен до начала действия. Наконец, физическое выполнений действий осуществляется за счёт Qwen-RobotManip — универсальной модель класса «зрение-язык-действие» (VLA), построенной на архитектуре Qwen3.5-4B.


Добавить комментарий